Optimization is often introduced through smooth landscapes and ordinary gradients. In multiobjective optimization, however, the geometry of a finite approximation set can change abruptly: points can switch nondomination status, layers can appear or disappear, and different points can suddenly become active in shaping the dominated region. At such events, the objective is no longer classically differentiable. This is where a Clarke-type viewpoint becomes natural.
The demo below explores a simple idea for Pareto front approximation. Instead of evaluating only the first nondominated front, we decompose a finite approximation set into its successive nondomination layers. The first layer has highest priority, while deeper layers act only as tie-breakers. In this way, dominated points are not ignored completely, but they are never allowed to outweigh the quality of the first front.
The key geometric quantity is the magnitude of the anchored dominated set. For a finite set



where 


For an approximation set 


with 
The ascent step itself is a projected Clarke ascent step. Starting from the current approximation set



where 

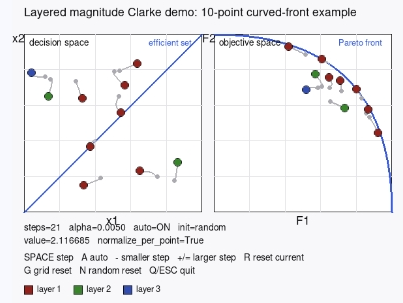
In the interactive example, one can watch how an initially imperfect approximation set moves toward the Pareto front. First, the dominant first-layer term drives the points toward front quality; later, the repulsion term helps distribute them more evenly. In the curved ten-point example, the motion becomes especially visible: in decision space, paths bend toward the efficient diagonal, while in objective space their images bend toward the curved Pareto front.
I like this example because it turns a fairly abstract idea from nonsmooth optimization into something one can actually see. The objective is only piecewise smooth, yet the optimization still has a clear geometric logic: climb in a generalized ascent direction, project back to feasibility, and let the layered magnitude pull the approximation set toward a better front.
Interactive demo:
Interactive python demo of Clarke cone ascent for layered magnitude
Code and reproducibility:
GitHub repository
References:
Clarke, F. H. Optimization and Nonsmooth Analysis. SIAM, 1990. Publisher page.
Custódio, A. L., Madeira, J. F. A., Vaz, A. I. F., and Vicente, L. N. “Direct Multisearch for Multiobjective Optimization.” SIAM Journal on Optimization 21(3):1109–1140, 2011. DOI.
Deist, T. M., Maree, S. C., Alderliesten, T., and Bosman, P. A. N. “Multi-objective Optimization by Uncrowded Hypervolume Gradient Ascent.” In Parallel Problem Solving from Nature – PPSN XVI, LNCS 12270, pp. 186–200, Springer, 2020. DOI.
M. T. M. Emmerich, The Magnitude of Dominated Sets: A Pareto Compliant Indicator Grounded in Metric Geometry,
arXiv preprint, 2026.
arXiv link
K. Miettinen and M. M. Mäkelä, An Interactive Method for Nonsmooth Multiobjective Optimization with an Application to Optimal Control,
Optimization Methods and Software, 2(1), 31–44, 1993.
DOI link
T. Leinster, The Magnitude of Metric Spaces, Documenta Mathematica, 18, 857–905, 2013. journal link