In many algorithmic settings, the use of balanced trees, heaps, or other dynamic data structures is the standard way
to achieve good asymptotic complexity. However, these structures can introduce memory fragmentation, unpredictable
allocation patterns, garbage collection overhead, and branch-heavy execution — all undesirable in systems where
performance must be deterministic and low-level behavior is important. For applications such as embedded systems,
GPU kernels, or tight inner loops of optimization routines, it is often preferable to rely purely on
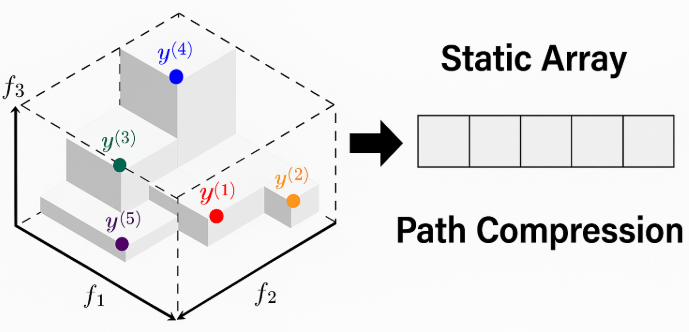
static arrays with direct indexing. This article shows how the well-known 3-D hypervolume indicator — typically
computed with dynamic search trees — can be implemented efficiently in 
Efficient exact computation of the 3-D hypervolume indicator (HV) in multiobjective optimization is a well-studied topic. A key milestone is the
dimension-sweep approach of Fonseca, Paquete, and López-Ibáñez (2006) for 3-D HV, where a
balanced tree maintains the 2-D projection during the sweep. In embedded or performance-sensitive settings
(deterministic memory, fewer allocations/GC, predictable constants) we may prefer to avoid dynamic data structures.
This post presents a clean
Problem Setting (Maximization)
Given a finite set 

![\mathrm{HV}(P)=\lambda^3\!\Big(\bigcup_{p\in P}[0,p_x]\times[0,p_y]\times[0,p_z]\Big).](https://s0.wp.com/latex.php?latex=%5Cmathrm%7BHV%7D%28P%29%3D%5Clambda%5E3%5C%21%5CBig%28%5Cbigcup_%7Bp%5Cin+P%7D%5B0%2Cp_x%5D%5Ctimes%5B0%2Cp_y%5D%5Ctimes%5B0%2Cp_z%5D%5CBig%29.&bg=ffffff&fg=000&s=0&c=20201002)
We compute this exactly via a z-sweep (descending 
Algorithm Overview
Z-sweep
Sort distinct 

![[z^{(k+1)},z^{(k)}]](https://s0.wp.com/latex.php?latex=%5Bz%5E%7B%28k%2B1%29%7D%2Cz%5E%7B%28k%29%7D%5D&bg=ffffff&fg=000&s=0&c=20201002)



2-D projection maintenance (arrays only)
We maintain the 2-D skyline in
- Fix a static order by
(ties by
) to index points
.
- Allocate arrays
prev_idx[]andnext_idx[](neighbors in that static order) and a booleanactive[]to mark skyline membership. - Insert each point once (when its z-level becomes active), discarding a contiguous run of dominated neighbors on the right and updating the area locally.
Path-compressed skip pointers
Each index in the static prev_idx[] and next_idx[]. When a node becomes inactive (dominated),
we do not physically remove it; lookups must skip it to reach the nearest active neighbor. We apply a simple
path compression rule: whenever a lookup traverses an inactive chain, intermediate links are rewired directly to the
first active node found. For example:
def find_next_active(pos):
j = next_idx[pos]
while j != -1 and not active[j]:
next_idx[pos] = next_idx[j] # path compression
j = next_idx[pos]
return j
After one such traversal, later lookups from the same position jump directly to the correct active neighbor, bypassing inactives. In practice, each neighbor lookup is effectively constant time on average, because every skipped node is permanently bypassed once it becomes inactive. The structure behaves like a direct-access array—no balanced trees needed.
Area formula (minimization view)
In the minimization variant (used in code via sign flip), if the skyline nodes in ascending 




All updates when inserting/removing a local run are expressed with differences of these terms, touching only neighbors.
Pseudocode (Core Skeleton)
# Input: points (x,y,z), reference r=(0,0,0) for maximization
# Step 0: sign flip to minimization: (x,y,z) -> (-x,-y,-z), r -> -r
# Step 1: bucket points by z (ascending), tie-break by (x,y)
# build static Y-order (ascending y; tie x), arrays prev_idx[], next_idx[], active[]
# Step 2: maintain scalar area_2d = 0
# Helpers: find_prev_active / find_next_active using path compression
# Helper: add_node(pos):
# L = prev active; R = next active
# if L exists and x[L] return
# remove a right run while x[right] >= x_new; adjust area_2d locally
# add the new node; connect to first kept right; mark active; mark removed as inactive
# Step 3: z-sweep:
# insert first z-level points with add_node
# for each slab [z_k, z_{k+1}]: HV += area_2d * (z_{k+1}-z_k); then insert z_{k+1} points
Complexity
Sorting by 
Worked Example (Updated Two Fronts) + Visualization
We replace the old instance with a more varied two-front set (maximization, reference $(0,0,0)$):


We indicate the dominated region (of which the Lebesgue measure is the 3-D Hypervolume indicator) in Figure 2. The exact hypervolume for this instance is:

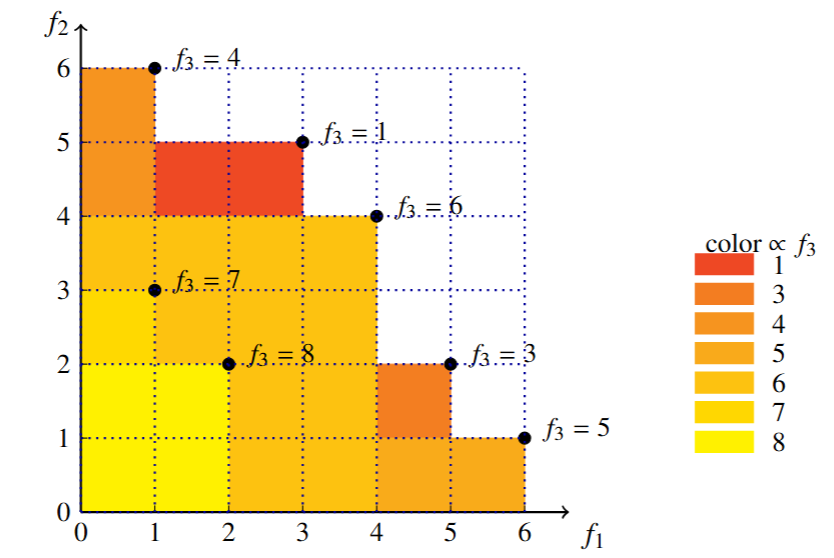
Figure 1: Opaque rectangles from $(0,0)$ to $(f_1,f_2)$, painted in ascending 
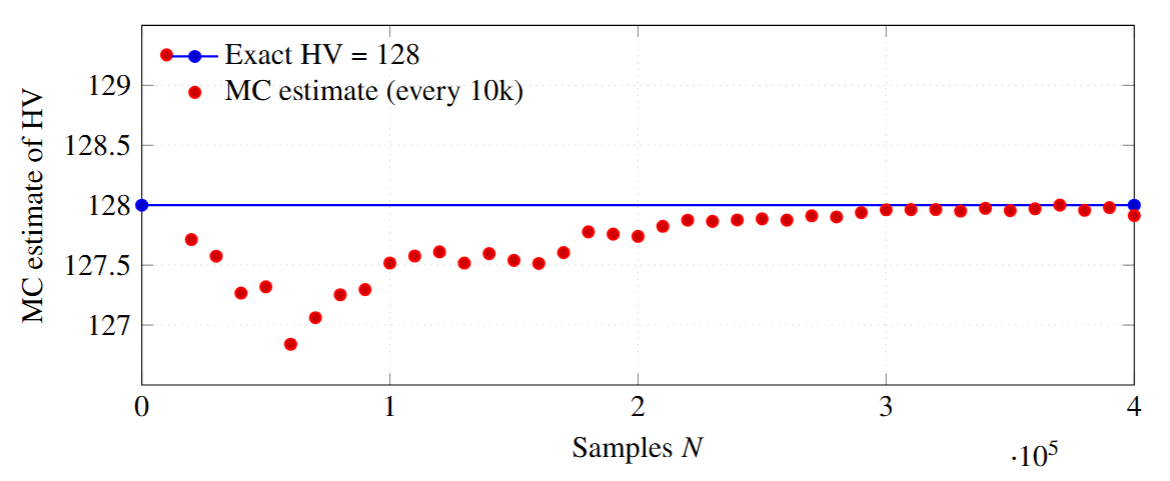
Figure 2. Monte Carlo convergence (every 10k samples up to 400k). Horizontal line marks the exact value
References
Fonseca, C. M., Paquete, L., & López-Ibánez, M. (2006, July). An improved dimension-sweep algorithm for the hypervolume indicator. In 2006 IEEE international conference on evolutionary computation (pp. 1157-1163). IEEE.
Appendix: Python implementation
The function below computes exact HV in ![[0,6]\times[0,6]\times[0,8]](https://s0.wp.com/latex.php?latex=%5B0%2C6%5D%5Ctimes%5B0%2C6%5D%5Ctimes%5B0%2C8%5D&bg=ffffff&fg=000&s=0&c=20201002)
Implementation note: All data structures are fixed-size arrays; the skip-pointer traversal uses path compression so subsequent neighbor lookups become effectively constant-time on average. No balanced trees or heaps are used.
CITE ME AS:
Emmerich, M. T. M. (2025, October 5). A tree-free path to efficiently compute the hypervolume indicator in three dimensions [Blog post, Multiobjective Optimization and Decision Analyis News]. http://www.emmerix.net.
from collections import defaultdict
def hypervolume_3d_min_arrays(points, ref):
"""
3-D hypervolume (minimization) via z-sweep and a 2-D skyline in (x,y),
implemented with static arrays and skip pointers (no trees).
"""
rx, ry, rz = map(float, ref)
# Filter to ref-box and stabilize order
P = [(float(x), float(y), float(z)) for (x, y, z) in points
if x <= rx and y <= ry and z <= rz]
if not P:
return 0.0
n = len(P)
xs = [p[0] for p in P]
ys = [p[1] for p in P]
# Bucket by z (ascending); tie-break within a level by (x,y)
by_z = defaultdict(list)
for i, (x, y, z) in enumerate(P):
by_z[z].append(i)
z_levels = sorted(by_z.keys())
for z in z_levels:
by_z[z].sort(key=lambda i: (xs[i], ys[i]))
# Static Y-order (ascending y; tie-break by x)
ordY = sorted(range(n), key=lambda i: (ys[i], xs[i]))
posY = [0]*n
for p, i in enumerate(ordY):
posY[i] = p
# Skip-pointer arrays over Y-order
prev_idx = [i-1 for i in range(n)]
next_idx = [i+1 for i in range(n)]
prev_idx[0] = -1
next_idx[-1] = -1
active = [False]*n
def x_at(pos): # multi-use
return xs[ordY[pos]]
def y_at(pos): # multi-use
return ys[ordY[pos]]
def find_prev_active(pos): # multi-use
j = prev_idx[pos]
if j == -1:
return -1
while j != -1 and not active[j]:
prev_idx[pos] = prev_idx[j]
j = prev_idx[pos]
return j
def find_next_active(pos): # multi-use
j = next_idx[pos]
if j == -1:
return -1
while j != -1 and not active[j]:
next_idx[pos] = next_idx[j]
j = next_idx[pos]
return j
area_2d = 0.0 # sum over active pos: (x_prev(pos) - x[pos]) * (ry - y[pos])
def add_node(pos): # multi-use
nonlocal area_2d
x_new = x_at(pos)
y_new = y_at(pos)
L = find_prev_active(pos)
R = find_next_active(pos)
# If dominated by left active (x_left <= x_new), ignore
if L != -1 and x_at(L) <= x_new:
return
# Remove consecutive right run with x >= x_new
removed = []
R_it = R
while R_it != -1 and x_at(R_it) >= x_new:
removed.append(R_it)
R_it = find_next_active(R_it)
R_keep = R_it # first right node with x < x_new (or -1)
# Decrement area: old edge into R_keep
if R_keep != -1:
x_prev_old = (x_at(removed[-1]) if removed else (x_at(L) if L != -1 else rx))
area_2d -= (x_prev_old - x_at(R_keep)) * (ry - y_at(R_keep))
# Decrement area: contributions of removed block
if removed:
x_prev = x_at(L) if L != -1 else rx
for rpos in removed:
area_2d -= (x_prev - x_at(rpos)) * (ry - y_at(rpos))
x_prev = x_at(rpos)
# Add area: new node + new edge to R_keep
xL = x_at(L) if L != -1 else rx
area_2d += (xL - x_new) * (ry - y_new)
if R_keep != -1:
area_2d += (x_new - x_at(R_keep)) * (ry - y_at(R_keep))
# Activate new, deactivate removed
active[pos] = True
for rpos in removed:
active[rpos] = False
# ---- z-sweep ----
hv = 0.0
# Insert first z level
first_z = z_levels[0]
for i in by_z[first_z]:
add_node(posY[i])
# Process slabs
for k in range(len(z_levels)):
z_cur = z_levels[k]
z_next = rz if k+1 == len(z_levels) else z_levels[k+1]
hv += area_2d * (z_next - z_cur)
if k+1 < len(z_levels):
for i in by_z[z_levels[k+1]]:
add_node(posY[i])
return hv
def hypervolume_3d_max(points, ref=(0.0,0.0,0.0)):
# Reduce maximization to minimization by negation
neg_points = [(-x, -y, -z) for (x,y,z) in points]
neg_ref = (-ref[0], -ref[1], -ref[2])
return hypervolume_3d_min_arrays(neg_points, neg_ref)
if __name__ == "__main__":
# Updated example (two fronts)
P = [(1,6,4), (3,5,1), (4,4,6), (5,2,3), (6,1,5), (1,3,7), (2,2,8)]
print("Exact HV:", hypervolume_3d_max(P, (0,0,0))) # 128.0
def hv_monte_carlo(points, N=400_000, step=10_000):
maxx = max(x for x,_,_ in points)
maxy = max(y for _,y,_ in points)
maxz = max(z for *_,z in points)
Vbox = maxx * maxy * maxz
def covered(x,y,z, pts):
for (px,py,pz) in pts:
if x <= px and y <= py and z <= pz:
return True
return False
random.seed(42)
cnt = 0
series = [] # (N, estimate)
for i in range(1, N+1):
x = random.random() * maxx
y = random.random() * maxy
z = random.random() * maxz
if covered(x,y,z, points):
cnt += 1
if i % step == 0:
est = Vbox * (cnt / i)
series.append((i, est))
return series # plot these pairs
if __name__ == "__main__":
P = [(1,6,4), (3,5,1), (4,4,6), (5,2,3), (6,1,5), (1,3,7), (2,2,8)]
print(hv_monte_carlo(P))
